Modelling and simulating crack propagation in 3D-printed structures
Phase field fracture: Towards a generic method to follow the equilibrium path of the structure
Congrès des Jeunes Chercheurs en Mécanique
F. Loiseau 
IMSIA, ENSTA Paris, CNRS, EDF, Institut Polytechnique de Paris 91120 Palaiseau, France
V. Lazarus
August 28, 2024
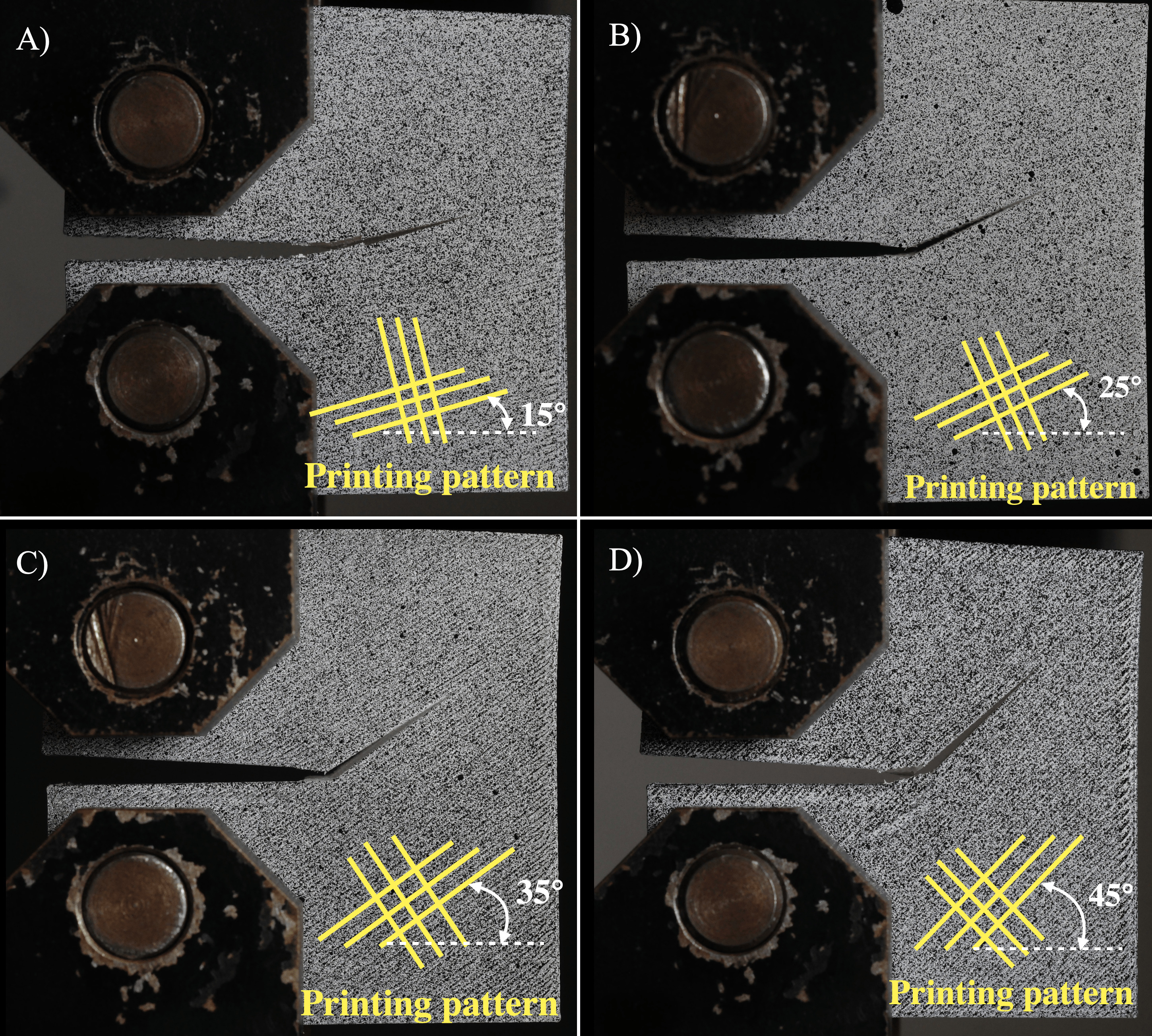
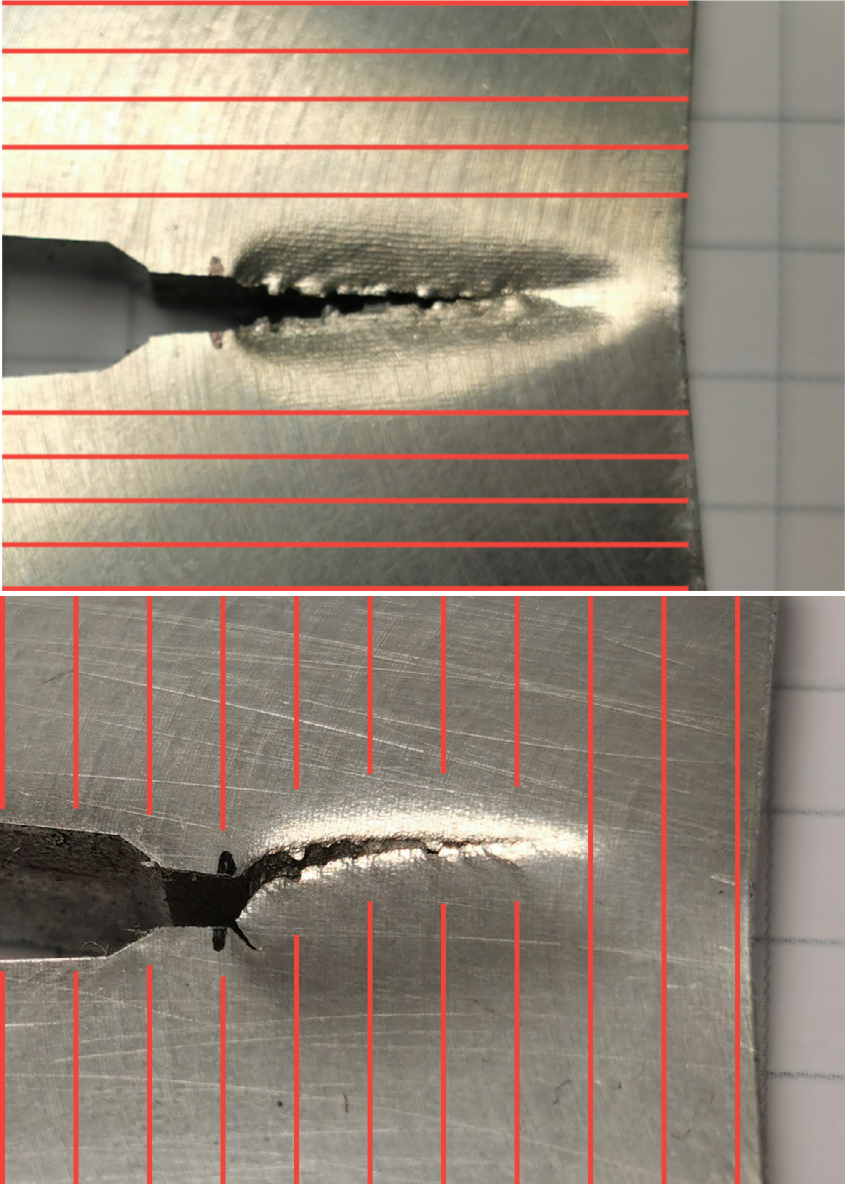
Fracture in 3D-printed structures
Global objective
Fracture mechanics problem
We consider
- a domain \(\Omega\) with a pre-crack \(\Gamma_0\),
- an elastic material (\(E\), \(\nu\)),
- a force or displacement load,
and we want to determine
- the crack-path,
- the force-displacement curve,
- the evolution of the displacement field.

To solve this problem, we want to employ numerical methods.
Phase-field fracture
The state of a domain \(\Omega\) is described by:
- a displacement field \(\boldsymbol{u}(\boldsymbol{x})\),
- a crack phase field \(\alpha(\boldsymbol{x})\).

The state fields are governed by an energy minization problem, \[ (\boldsymbol{u}, \alpha) = \arg\min_{\substack{\boldsymbol{u}^* \in \mathcal{U} \\ \alpha^* \in \mathcal{A}}} \ \underset{\text{elastic}}{\mathcal{E} (\boldsymbol{u}^*, \alpha^*)} + \underset{\text{dissipation}}{\mathcal{D} (\alpha^*)} - \underset{\text{external work}}{\mathcal{W}_{\mathrm{ext}} (\boldsymbol{u}^*)} \]
Issues due to fracture (displacement loading)










Issue due to fracture (force loading)








Path-following methods 1

Control equation
Control by Maximum Strain Increment (Chen & Schreyer, 1990)
The idea is to limit the maximum strain variation in the domain using the equation \[ \max_{\boldsymbol{x}\in \Omega} \left( \frac{\boldsymbol{\varepsilon}(\boldsymbol{u}_{n-1})}{\| \boldsymbol{\varepsilon}(\boldsymbol{u}_{n-1}) \|} : {\color{\red}\Delta \boldsymbol{\varepsilon}(\boldsymbol{u})} \right) - \Delta \tau= 0, \]
where \(\Delta \tau\) is the step size.

Solving the problem (alternate minimization)





SENT specimen: Presentation


SENT specimen: Displacement control

SENT specimen: Path-following control

CT specimen with force boundary conditions


Thank you for your attention !
F. Loiseau, V. Lazarus
flavien.loiseau@ensta-paris.fr

